北清智能-你贴心的实验检测仪器供应商
134-0517-6475
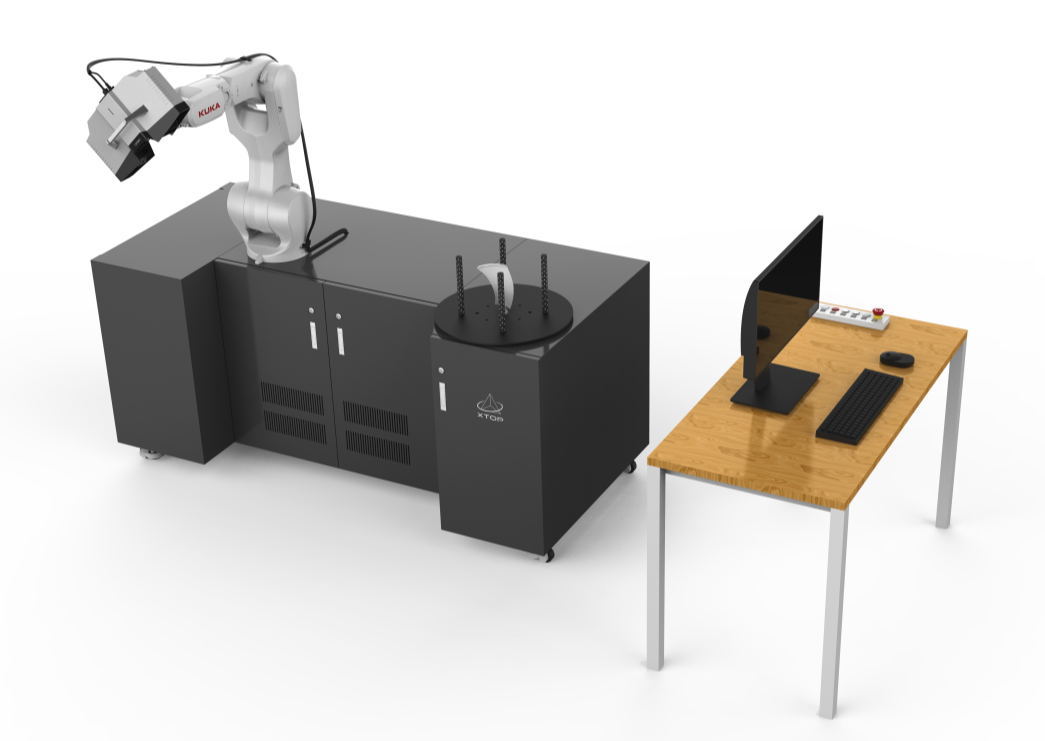
自动机器人三维扫描系统大幅面蓝光扫描
产品类别:机器人视觉扫描
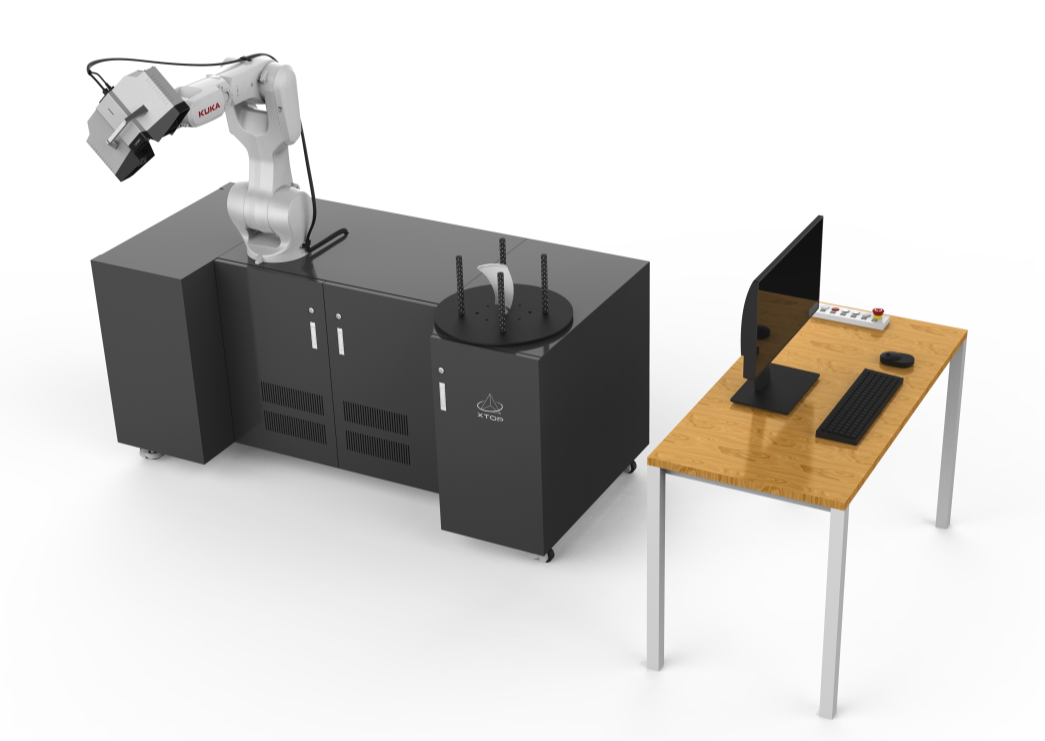
自动机器人三维扫描系统大幅面蓝光扫描
系统软件
● 对于部分零部件实现自动规划扫描轨迹(无需人工编程控制机器人),部分复杂零部件存在干涉多,遮挡复杂的需要进行人工编程控制。
● 测量幅面:600*450mm
● 系统自动测技术:在工作过程中能对校准状态、转换精度、环境变化和部件位移进行实时控,并给予补偿,测量数据的可靠性。
● 扫描预览:在扫描的过程中,系统实时跟踪标志点,显示拼接结果。
● 扫描模式:非接触式蓝光扫描,横向和竖向两次多频相移编码光栅投射。
自动机器人三维扫描系统大幅面蓝光扫描

设备描述
系统测量头
● 测量相机:工业相机,890万像素
● 测量幅面:600*450mm
● 单幅精度:0.025mm
● 光源:蓝光光源。
● 扫描仪测量头集成激光示距,可直观标示当前扫描距离,并在投射光栅时自动关闭。

系统软件
● 对于部分零部件实现自动规划扫描轨迹(无需人工编程控制机器人),部分复杂零部件存在干涉多,遮挡复杂的需要进行人工编程控制。
● 测量幅面:600*450mm
● 系统自动测技术:在工作过程中能对校准状态、转换精度、环境变化和部件位移进行实时控,并给予补偿,测量数据的可靠性。
● 扫描预览:在扫描的过程中,系统实时跟踪标志点,显示拼接结果。
● 扫描模式:非接触式蓝光扫描,横向和竖向两次多频相移编码光栅投射。
● 具体自动曝光和双曝光模式。针对不同颜色的工件,可实现曝光时间自动调整;扫描过程中,标志点和被测工件处在不同曝光区间,避免环境光过亮或过暗带来误差(对于高亮反光零部件表面需要喷显影剂后进行扫描)。
● 基于多线程的高效运算,单次光栅投射时间快<1.5秒。
● 相机标定:采用12位环形编码点标定板进行系统标定,软件有标定指引界面,保证设备标定精度,支持多测头同时标定,支持外部导入点标定,支持外部图像导入进行标定。标定过程中,支持多种图像去畸变模式;若配置电动转台可自动标定。
● 拼接方式:支持基于标志点、特征拼接和基于电动转台的三种全自动拼接方式。
● 全局精度控制:扫描系统自带摄影测量功能,可以先扫描标志点,进行全局点的计算和测量,再扫描物体点云,保证复杂工件的拼接精度。
● 分组扫描:支持对同一个工件进行分组扫描,可新建多个分组进行工件不同位置的扫描,之后将不同组的扫描结果进行对齐拼接,得到复杂工件的扫描数据。
● 单次扫描结果自动生成网格数据(STL),并自动去除标记点,提高数据精度,减少后处理时间。
● 探针测量:对于沟槽、孔洞等难以扫描的死角,系统具备接触式探针测量功能。
● 多重混合扫描:具备单目、双目等多种模式,针对不同表面特征的被测物可以采取不同的扫描模式,以获得更好的扫描结果。
● 网格医生:具备去孤立网格数据,去除自相交等优化网格数据的功能。
● 网格平滑:软件对网格数据具有不同的平滑等级选择,优化数据结果。
● 网格补洞:对于无法扫描和测量的区域,系统可以根据曲率自动完成修补补洞;也可根据需要,手动填补孔洞。
● 具有网格封装模式,封装结果无需补洞即可用于3D打印。
● 坐标转换功能:321转换、分组对齐多种坐标转换功能。

检测软件
● 检测软件具有数据对齐功能:具备自动对齐和手动对齐两种模式,实现CAD模型和扫描结果对齐。
● 检测软件可计算CAD和扫描结果之间的偏差,结果以色谱图的形式表现,并可根据需要,标注位置的点偏差。
● 检测软件可输出详细的检测报告,评价检测结果。
编码型标定板
● 12位环形编码点标定板,每块标定板上特定编码点不少于15个。
● 进行相机参数的标定,确定被测物体空间坐标。
● 一块标定板即可完成400*300mm或200*150mm两种幅面的标定。
高性能图形工作站
● DELL T3630;CPU:i7-9700;内存:32GB;硬盘:256G固态+1T机械;显卡:P2000;显示器:23.8寸(实际发货不低于此配置)

系统附件
● 内圆直径3mm标志点5000个
● 系统工具1套
● 显像剂1箱(12罐)(选配喷粉工具)
● 系统装箱单1套
● 合格证1套



